2、机械臂抓取与位姿估计
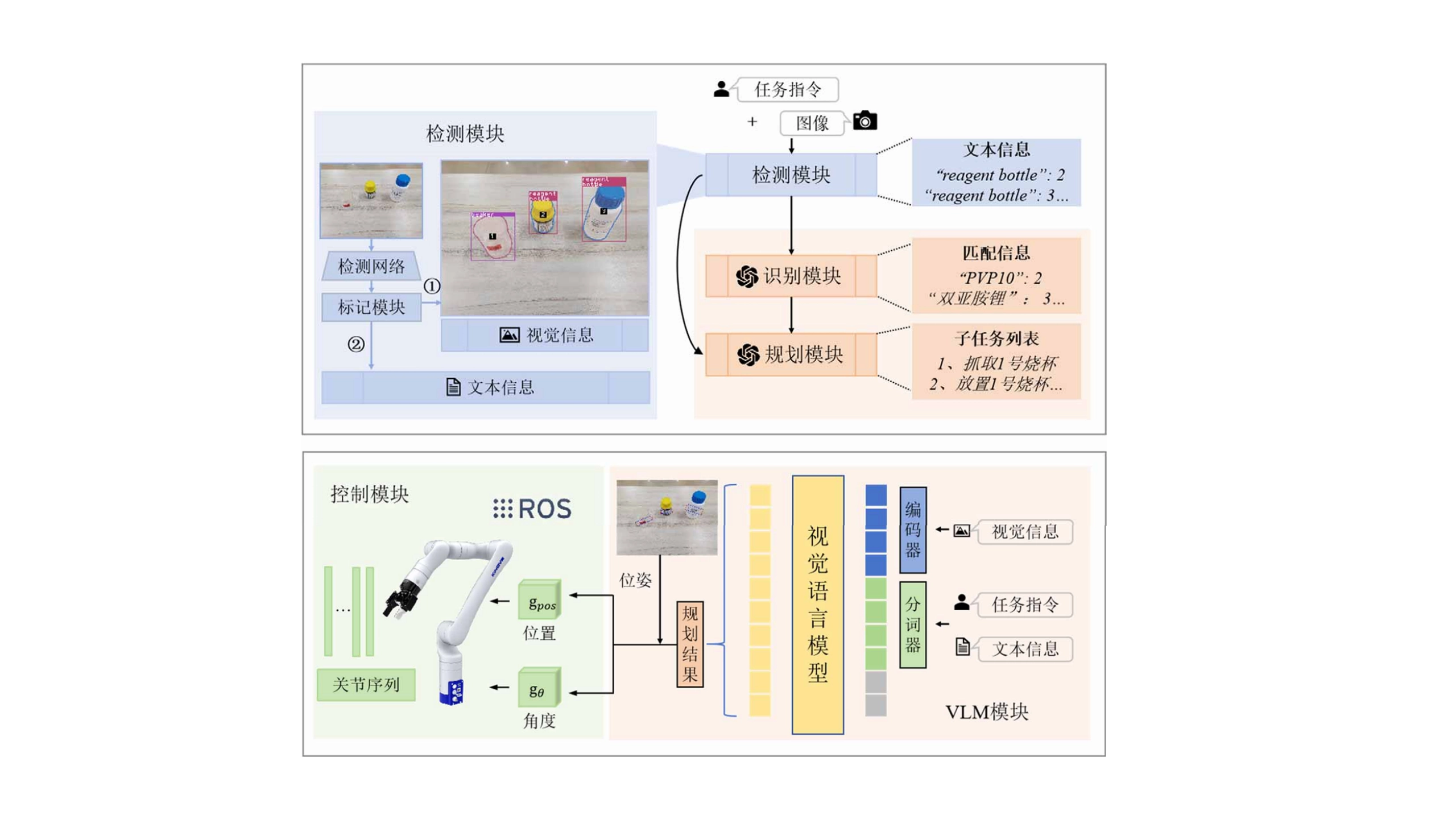
针对机械臂运动控制问题,提出基于逆运动学与轨迹平滑优化的控制方法,提升运动的灵活性与稳定性。在智能抓取规划方面,构建视觉语言模型(VLM)驱动的决策框架,融合视觉与语言语义信息,实现目标消歧与任务导向的抓取策略生成。针对动态目标抓取,研究基于孪生网络与扩展卡尔曼滤波的跟踪预测算法,通过学习目标时序特征并实时估计运动轨迹,动态优化抓取路径。
上一条:1、机器人自动化控制算法研究 下一条:3、多模态环境感知与融合
【关闭】