1、机器人自动化控制算法研究
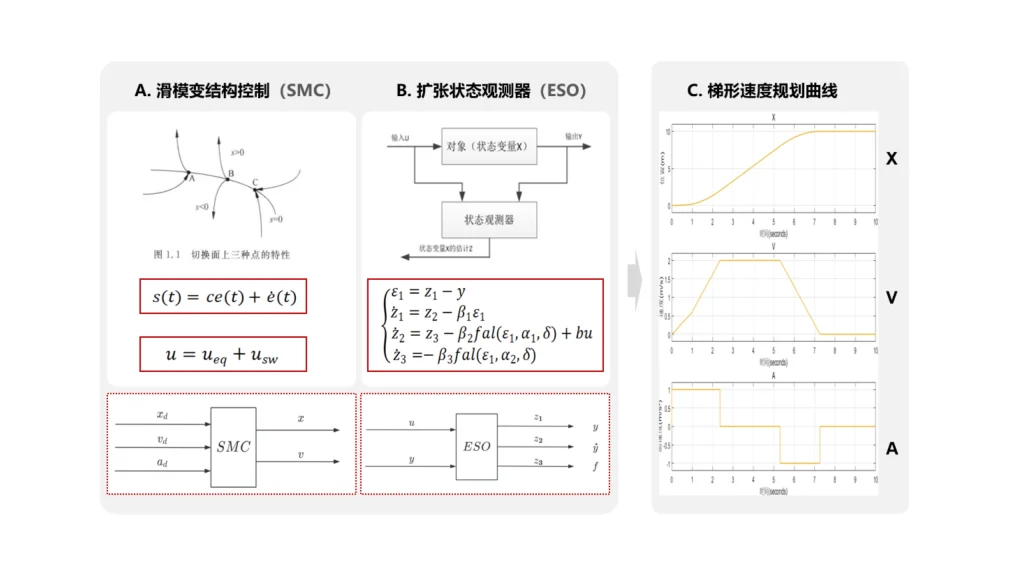
针对机器人作业过程力学载荷和扰动在时空分布不连续问题,探索开发不依赖系统准确模型的控制算法。通过传感器采集环境和系统作业信息,计算分析、预测被控对象动力学行为,利用观测器对系统模型不确定性和干扰进行观测补偿和预报,提高系统控制的稳定性。
下一条:2、机械臂抓取与位姿估计
【关闭】