3、多模态环境感知与融合
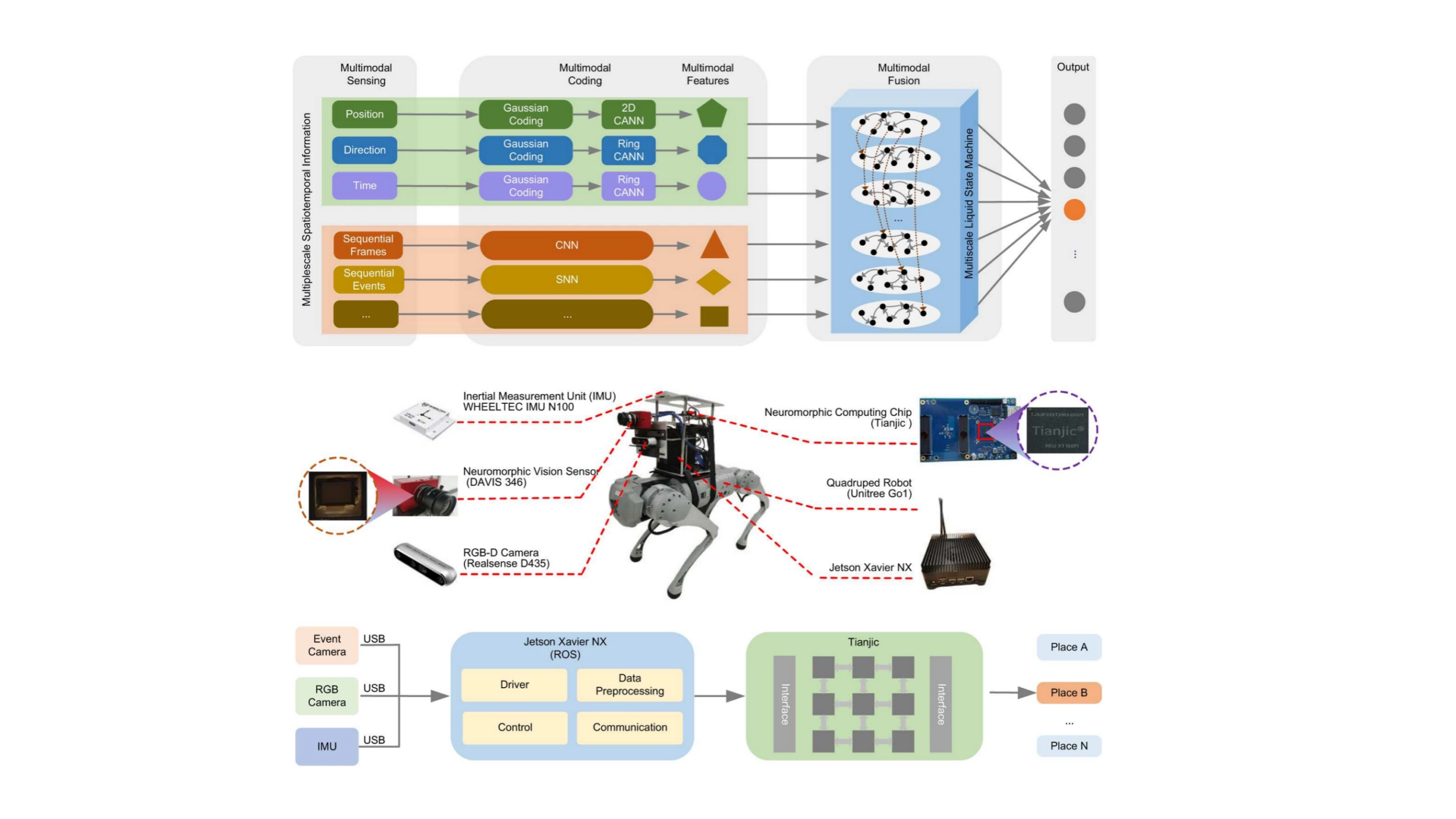
针对边缘设备对于智能决策的实时性要求以及复杂动态环境下的自适应能力需求,研究多模态信息融合的机器学习理论、方法、模型与系统框架。通过融合视觉、声音、传感器等多源异构数据,提升边缘设备对环境的全面感知与理解能力;构建具备动态环境感知与自主学习能力的智能系统框架,增强系统在复杂场景中的鲁棒性与泛化能力,推动边缘智能向更高层次的自主化与智能化发展。
上一条:2、机械臂抓取与位姿估计
【关闭】